Robotorsteuerung
Hier wurde eine Matrixkamera über der Palette installiert, um die Position der Objekte zu erfassen. Ein Hubtisch sorgt dafür, dass die oberste Lage immer auf eine genormte Position zwischen einem Lichtvorhang gebracht wird.
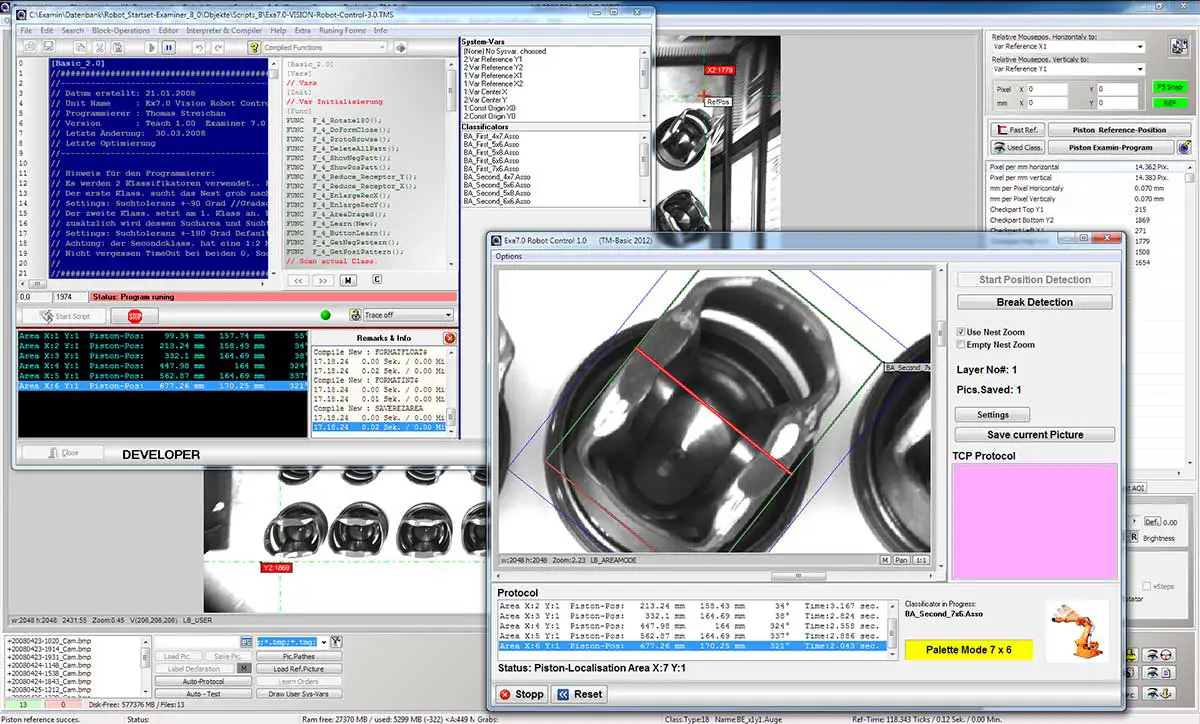
Für die Robotersteuerung werden dem Roboter dann die Koordinaten in X- und Y-Richtung sowie die Winkelgrade übergeben, während die Z-Position fest vorgegeben ist. Das Ganze läuft in einem speziell für diese Aufgabe programmierten Basic-Script ab, um eine präzise und effiziente Steuerung zu gewährleisten.
Siehe auch Basic Scripting.
-
Bild 1